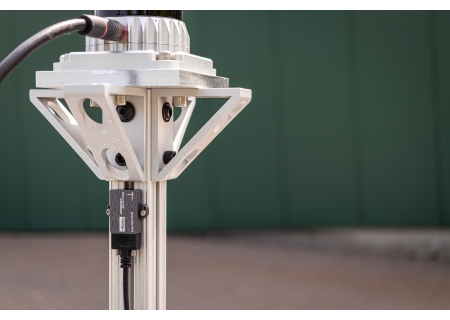


IMU/AHRS Robusta De Grado Táctico
IMU/AHRS de grado táctico IP68 robusto. Calibrado individualmente para un rendimiento óptimo. Cuenta con un avanzado filtro Kalman extendido, algoritmos de orientación de vanguardia, gestión avanzada del tiempo y sistema de activación de eventos.
ESPECIFICACIONES
Sensor
- Giroscopio de grado táctico (inestabilidad de polarización de 1,5°/h)
- Totalmente calibrado en todo el rango de temperatura
- Precisión de balanceo/cabeceo
- Estática: 0.25°
- Dinámico: 0.5°
- Magnetómetro integrado para el seguimiento absoluto del rumbo
Operación
- Filtro Kalman extendido integrado para estimación de actitud
- Gama de acelerómetros y giroscopios seleccionables por el usuario
- Frecuencias de muestreo ajustables de hasta 1 KHz
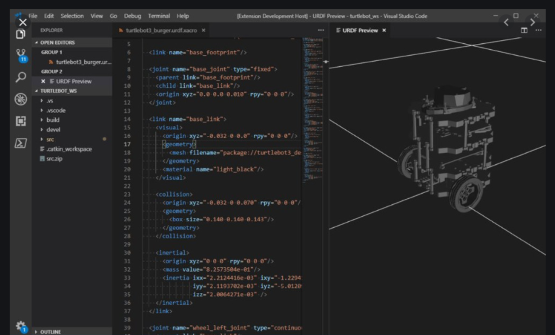
- Controlador ROS1 y ROS2 compatible de fábrica
- Software SensorConnect para configuración, control, visualización y registro
- API de código abierto MSCL para una fácil integración
Paquete
- Paquete IP68 robusto
- Carcasa de aluminio anodizado mecanizado con precisión
- Características de alineación de precisión
- Compacto y de bajo perfil
- 36,2 mm x 36,6 mm x 10,2 mm
- 17,7 gramos
- Rango de temperatura de funcionamiento de –40 a +85 °C
DOCUMENTACIÓN
Documentación general
Notas técnicas
DESCARGAS
Software/Firmware
Más
SOFTWARE
SENSORCONECTAR
Gratis
SensorConnect es la próxima generación en software de detección de escritorio. Desde la configuración de nodos y redes de arranque, hasta la recopilación y análisis de datos en tiempo real, SensorConnect proporciona una experiencia moderna y potente con nuestros productos inalámbricos, inerciales y de desplazamiento. Utilizando nuestros algoritmos inteligentes de recopilación de datos y gráficos, puede visualizar cantidades masivas de datos al instante y luego acercar los puntos de interés con la misma rapidez. La funcionalidad incorporada de MathEngine permite matemáticas tanto en tiempo real como postprocesadas, como generar FFT, promedios, RMS, etc.
{MSCL}
API gratuita y de código abierto
La biblioteca de comunicación MicroStrain (MSCL) simplifica la escritura de código que interactúa con nuestros sensores inalámbricos, inerciales y de desplazamiento. MSCL es completamente de código abierto y está alojado en GitHub bajo la licencia MIT. Se proporciona documentación completa, código de ejemplo y una guía de inicio rápido para ayudarle a empezar. Disponible para C++, Python y .NET.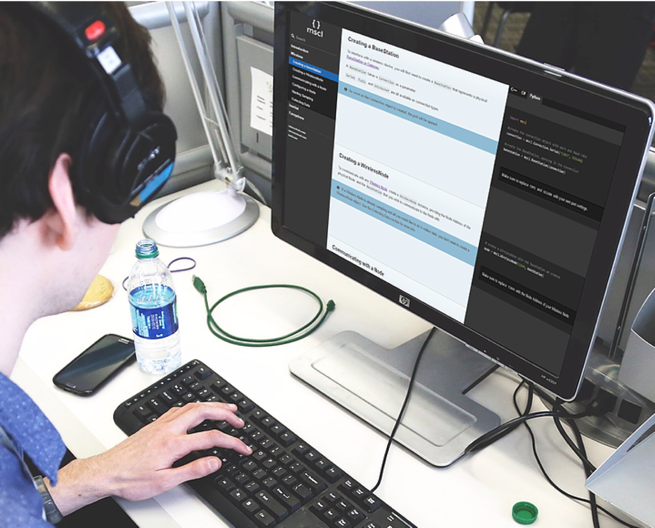
ROS
Robot Operating System (ROS) es un metasistema operativo de código abierto para su robot. Proporciona los servicios que esperaría de un sistema operativo, incluida la abstracción de hardware, el control de dispositivos de bajo nivel, la implementación de la funcionalidad de uso común, el paso de mensajes entre procesos y la administración de paquetes. ROS se puede utilizar en la construcción y simulación de aplicaciones robóticas, así como vehículos terrestres no tripulados y localización y mapeo simultáneos (SLAM). Para facilitar una mejor integración dentro del ecosistema ROS, Microstrain ha desarrollado una serie de controladores de código abierto sin licencia (licencia MIT) diseñados y probados específicamente para ROS.